РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ
КОНТУРА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ МУЛЬТИРОТОРНОГО ТИПА
Нартов М.В.
студент специалист
Балтийский государственный технический университет БГТУ «ВОЕНМЕХ
» им. Д.Ф.Устинова, Россия, г. Санкт-Петербург.
Вильданов Р.Р.
студент специалист
Балтийский государственный технический университет БГТУ «ВОЕНМЕХ
» им. Д.Ф.Устинова, Россия, г. Санкт-Петербург.
Аннотация.
В
статье рассматривается разработка оптимальной упрощенной математической модели
контура управления и стабилизации квадрокоптером.
Ключевые
слова: квадрокоптер, математическая
модель, беспилотный летательный аппарат,
управление.
В современном мире большую роль в жизни
человека играют различные автономные
мобильные роботы. Аппараты, обладающие замкнутой системой управления, способны выполнять свои обязанности автоматически и
без фактического управления человеком. Подобные роботехнические системы с каждым годом находят все большее
применение, как в гражданской, так и в военной сферах деятельности. Особенно важна роль автономных аппаратов в различных ситуациях,
при которых отсутствует возможность использования радиоуправляемых аппаратов.
Мультироторные летальные аппараты, в частности, квадрокоптеры, на сегодняшний день являются самыми
массовыми беспилотными летательными аппаратами.
Первые радиоуправляемые мультикоптеры гражданского назначения появились в 2006 году и быстро
обрели популярность. Со временем перед человечеством встал вопрос создания
полностью автономных дронов. Необходимость реализации подобных аппаратов объясняется ситуациями, когда сфера
деятельности робота предполагает выполнение задач в условиях частичной или
полной неопределенности внешней среды. Создание полностью автономных
летательных аппаратов в свою очередь сопровождается различными сложностями, главной из которых является обеспечение
устойчивости системы управления при воздействии на аппарат различных внешних
возмущений.
Квадрокоптер, как объект
управления, является динамической нелинейной замкнутой системой
и имеет шесть степеней свободы. Аппарат
движется относительно неподвижной инерциальной системы отсчета, связанной с
Землей и заданной перпендикулярными друг другу координатными осями OX, OY и OZ, причем ось OZ направлена противоположно
вектору силы тяжести. С квадрокоптером связана система координат, центр которой размещен в центре масс
аппарата, а оси параллельны и сонаправлены с осями
неподвижной системы. Угловое положение аппарата задается тремя углами Эйлера:
углами крена φ, тангажа θ и рыскания ψ, определяющими вращение вокруг осей соответственно. Управляющими воздействиями при этом
являются угловые скорости вращения четырех винтов квадрокоптера Ωi [1;2;3]. Трехмерная схема квадрокоптера, а так же силы и
моменты, действующие на аппарат, представлены на рисунке 1.
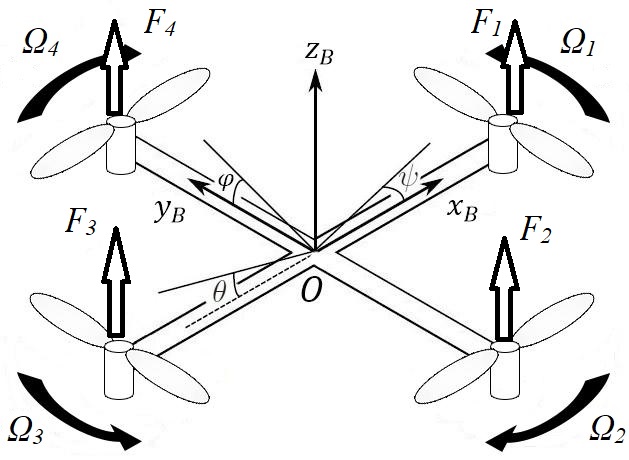
Рисунок 1 – Трехмерная схема квадрокоптера.
На рисунке 1: ![]() компонент вектора подъемной силы i-го ротора;
компонент вектора подъемной силы i-го ротора; ![]() компонент вектора угловой скорости вращения i-го ротора; θ, φ, ψ –
углы тангажа, крена и рысканья
соответственно; xb,yb,zb – связанная система координат квадрокоптера [1].
компонент вектора угловой скорости вращения i-го ротора; θ, φ, ψ –
углы тангажа, крена и рысканья
соответственно; xb,yb,zb – связанная система координат квадрокоптера [1].
Поворот аппарата вокруг декартовых
осей координат в трехмерном пространстве может быть представлен в виде ZYX-преобразования:
 ,
,
где ![]()
Допустим, что винты 1,3 вращаются по часовой стрелке, а винты 2,4 — против. Далее введем обозначения
физических параметров квадрокоптера: m — масса аппарата; l – расстояние от центра масс квадрокоптера до центра мотора. J1, J2, J3 —моменты инерции вокруг осей OX, OY, OZ. Предположим, что все винты коптера вращаются в одной
плоскости, при этом оси вращения перпендикулярны плоскости xb, yb. Воспользуемся
упрощенной динамической моделью квадрокоптера [2]:
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ,
,![]() ; (3)
; (3)
![]() ,
, ![]() . (4)
. (4)
В качестве управляющих каналов в системе управления квадрокоптера выступают угловые
скорости вращения роторов. Квадрат угловых скоростей
винтов в таком случае пропорционален силам и моментам, возникающим в результате
воздействия управляющих сигналов. В этой связи, для достижения необходимого режима работы беспилотного
аппарата необходимо осуществить связь совокупности управляющих сигналов со степенями
свободы квадрокоптера через уравнения
связи, описывающие различные режимы полета дрона в пространстве.
Введем в рассмотрение уравнения виртуального управления,
представляющие собой линейные комбинации подъемных сил ![]() , выраженных через
квадраты угловых скоростей
, выраженных через
квадраты угловых скоростей ![]() , предварительно
обозначив режимы полета квадрокоптера:
, предварительно
обозначив режимы полета квадрокоптера:
·
Движение вдоль оси OZ. Данный режим
подразумевает одновременное увеличение или уменьшение скорости вращения всех
четырех винтов. В таком режиме движения, при нулевых
углах крена и тангажа, квадрокоптер осуществляет взлет
или посадку. Уравнение, описывающее полученное движение выглядит следующим
образом:
![]() , (5)
, (5)
где ![]() управляющее воздействие первого режима полета;
управляющее воздействие первого режима полета;
·
поворот вокруг оси OX. Подобный маневр
достигается путем одновременного
увеличения/уменьшения значения ![]() и уменьшением/увеличением значения
и уменьшением/увеличением значения ![]() . Подобный режим
характеризуется изменением угла крена и описывается следующим уравнением:
. Подобный режим
характеризуется изменением угла крена и описывается следующим уравнением:
![]() , (6)
, (6)
где ![]() управляющее воздействие первого режима полета;
управляющее воздействие первого режима полета;
·
поворот вокруг оси OY. Данное движение достигается
путем одновременного увеличения/уменьшение значений ![]() и
и ![]() , а так же
уменьшения/увеличение значений
, а так же
уменьшения/увеличение значений ![]() и
и ![]() . Такое движение
сопровождается изменением угла рысканья и описывается следующим уравнением:
. Такое движение
сопровождается изменением угла рысканья и описывается следующим уравнением:
![]() , (7)
, (7)
где ![]() управляющее
воздействие третьего режима полета;
управляющее
воздействие третьего режима полета;
·
поворот вокруг оси OZ. Данное движение
достигается с помощью одновременного
увеличения/уменьшение значений ![]() и
и ![]() , а так же
уменьшения/увеличение значений
, а так же
уменьшения/увеличение значений ![]() и
и ![]() . Такое движение
сопровождается изменением угла рысканья и описывается
следующим уравнением:
. Такое движение
сопровождается изменением угла рысканья и описывается
следующим уравнением:
![]() , (8)
, (8)
где ![]() управляющее воздействие четвертого режима
полета.
управляющее воздействие четвертого режима
полета.
Таким образом, получаем множество уравнений, связывающих
скорости вращения роторов и силы, действующие на БПЛА.
Подставим уравнения (5) – (8) в систему (1) – (4), получим упрощенную математическую модель:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
где ![]() ,
, ![]() ,
, ![]() , – проекции векторов скорости на
соответствующие оси x, y, z;
, – проекции векторов скорости на
соответствующие оси x, y, z;
![]() – общий момент
инерции, возникающий вокруг оси винта в результате его вращения. Значение этого
момента зависит от реализации передаточного механизма
привода и конфигурации винтов;
– общий момент
инерции, возникающий вокруг оси винта в результате его вращения. Значение этого
момента зависит от реализации передаточного механизма
привода и конфигурации винтов; ![]() ,
, ![]() ,
, ![]() , – скорости изменения
соответствующих углов θ, φ, ψ.
, – скорости изменения
соответствующих углов θ, φ, ψ.
Вывод. Полученная в итоге система дифференциальных уравнений характеризует изменение координат
x, y, z, θ, φ, ψ. В свою очередь эти параметры определяют положение центра
масс квадрокоптера и его ориентацию в
пространстве под действием различных сил и моментов, а так же внешних воздействий.
Список использованной литературы:
1.
Максимова
А. М. Регулирование состояний полета квадрокоптера на
базе корректирующего ПД-регулятора [Текст] / А.М. Максимова // Молодой ученый.
— 2016. — №10. — С. 266-271.
2.
Altug E. Control of a Quadrotor Helicopter Using Visual Feedback [Text]:
materials of International Conference on Robotics & Automation, 2002. / E. Altug, J. P. Ostrowski, R. Mahony. – Washington: IEEE, 2002. – 16 с.
3.
Bouabdallah
S. Design and control of quadrotors with application
to autonomous flying [Text]: PhD thesis. / S. Bouabdallah;
Aboubekr Belkaid
University. – Tlemcen, Algeria, 2007. – 155 с.
Сведения об авторах:
Нартов
Михаил Валерьевич –
студент 5 курса кафедры И9 «Систем управления и компьютерных технологий» БГТУ «ВОЕНМЕХ
» им. Д.Ф.Устинова.
Вильданов Руслан Рафисович – студент 5 курса кафедры И9 «Систем
управления и компьютерных технологий» БГТУ «ВОЕНМЕХ » им. Д.Ф.Устинова.
DEVELOPMENT OF THE MATHEMATICAL MODEL OF THE
CONTROL OF THE UNMANNED MULTI-ROTARY AIRCRAFT
Nartov M.V., Vildanov
R.R.
Abstract. The article
discusses the development of an optimal simplified mathematical model of the
control and stabilization system of a quadrotor.
Keywords: quadrotor, mathematical model, unmanned aircraft, control.
References:
1.
Maksimova A.M. Regulation of the
flight status of a quadrocopter based on a corrective
PD controller [Text] / A.M. Maksimova // Young
scientist. — 2016. — №10. — pp. 266-271. (in Russian)
2.
Altug E. Control of a Quadrotor Helicopter Using Visual Feedback [Text]:
materials of International Conference on Robotics & Automation, 2002. / E. Altug, J. P. Ostrowski, R. Mahony. – Washington: IEEE, 2002. – 16 p.
3.
Bouabdallah
S. Design and control of quadrotors with application
to autonomous flying [Text]: PhD thesis. / S. Bouabdallah;
Aboubekr Belkaid
University. – Tlemcen, Algeria, 2007. – 155 p.